Matemática
Este estudo fiz para meu TCC na graduação em Licenciatura em Matemática. Deu um pouco de trabalho, levei cerca de $18$ meses em pesquisas, desenvolvimento e formatação. Espero que apreciem.
Devido ao ciclo da precessão ser lento, cerca de $26.000$ anos, seus efeitos também os são, causando o deslocamento do ponto vernal, antecipação dos equinócios e a constante alteração das coordenadas de um astro qualquer.
A Terra não está fixa no espaço e sim em constante movimento. Alguns de seus movimentos são simples de observar, como o movimento de rotação e de translação. Outros, porém, por serem lentos, escapam à percepção. Dos principais movimentos pode-se destacar:
$\bullet$ Movimento de rotação: A Terra gira em torno de seu eixo, inclinado cerca de $23,5^\circ$ em relação ao plano de sua órbita, com a duração de $1$ dia, cerca de $24$ horas.
$\bullet$ Movimento de translação ou revolução: É movimento da Terra em sua órbita elíptica em torno do Sol, com duração de $1$ ano, cerca de $365$ dias.
$\bullet$ Movimento no espaço: O Sol não está fixo, deslocando-se pelo espaço sideral, arrastando consigo todo o sistema planetário, na direção de um ponto chamado Ápex, situado na constelação de Lira.
$\bullet$ Movimento de precessão: É o movimento do eixo da Terra girando em torno do eixo da Eclíptica, com duração de aproximadamente $26.000$ anos.
Ao fato desse movimento causar o deslocamento, lento, mas gradual, do eixo da Terra, seus efeitos e conseqüências também os são, que, para um observador na Terra, se tornam imperceptíveis, portanto, alguns efeitos serão estudados para verificar se o movimento de precessão da Terra influi na vida terrestre.
Antigamente não era possível sua determinação, pois para a medida deste ângulo seria necessária a observação do ponto $\gamma$, que, sendo puramente geométrico, não pode ser observado.
No ano de $273\: a.C.$, o astrônomo e filósofo grego Timocharis $(320-260\: a.C.)$ efetuou a medida da longitude da estrela Spica $(\alpha \text{Virginis})$ utilizando-se de um eclipse lunar. Timocharis sabia que durante um eclipse lunar, o Sol forma com a Lua um ângulo de $180^\circ $ e, assim, pode-se medir o ângulo $\theta$ formado pela Lua e a estrela conforme mostra a figura $1$:
Sabia também o dia em que o Sol passava pelo ponto $\gamma$ e que a Terra descreve uma volta completa em torno do Sol em $1$ ano. Com isso, determinou a longitude do Sol da seguinte forma:
Como $t_s - t_\gamma= l_s$ e a revolução da Terra em torno do Sol descreve um arco de $360^\circ$, tem-se a relação:
\begin{equation}
\begin{matrix}
1\: \text{ano}=360^\circ \\
(t_s-t_\gamma)=l_s
\end{matrix}
\end{equation}
onde $t_s$ é a reta que liga a Terra ao Sol, $t_\gamma$ é a reta que liga a Terra ao ponto $\gamma$ e $l_s$ é a latitude do Sol.
Como $1$ ano equivale a $365,212199$ dias, substituindo na relação acima e com um regra de três simples chega-se à relação:
\begin{equation}
l_s=\frac{(t_s-t_\gamma)\cdot 360^\circ}{365,242199}
\end{equation}
Sendo $\beta$ o ângulo entre o Sol e a estrela Spica e $\theta$ o ângulo entre a estrela Spica e a Lua, medido no instante do eclipse lunar, temos que:
\begin{equation}
\beta=180^\circ - \theta
\end{equation}
Com $\beta$ e $l_s$ medidos, determinou-se a longitude da estrela, dada por $l_e$:
\begin{equation}
l_e=l_s + \beta
\end{equation}
Utilizando-se do eclipse lunar, Timocharis efetuou a medida da longitude da estrela Spica, encontrando um valor de $l_e = 172^\circ$.
No ano de $129\: a.C.$, a exatos $144$ anos após a medida de Timocharis, o astrônomo e matemático grego Hiparco refez a mesma medida utilizando-se do mesmo procedimento de Timocharis, encontrando um valor de $l_e = 174^\circ$. Verificou-se, então, uma variação de $2^\circ$ em $144$ anos, resultando $50^{\prime \prime}$ por ano.
A precessão se dá pela mudança do ponto em que o percurso aparente do Sol intercepta o Equador Celeste, se antecipando com o tempo, daí o nome precessão. Assim, Hiparco descobriu que o Sol não está sempre na mesma posição do zodíaco quando ocorrem os equinócios, sendo esta sua maior descoberta científica.
Hiparco viveu na cidade de Alexandria, mas trabalhou, sobretudo, em Rodes, onde construiu um observatório através do qual compilou um catálogo com a posição e a magnitude de $850$ estrelas do firmamento.
Assim, a força gravitacional do Sol é mais intensa no excesso de massa equatorial, tendendo a endireitá-la. Devido ao movimento de rotação, o efeito resultante é uma lenta mudança de direção do eixo axial no espaço, mudando os pólos celestes. O movimento é similar ao de um pião, figura $2$, que, ao girar, bamboleia em torno de seu eixo, contudo, lento e gradual. No caso da Terra, um ciclo completo leva cerca de $26.000$ anos.
Analisando geometricamente, nota-se que houve uma retrogradação do ponto $\gamma$, ou seja, o ponto $\gamma$ deslocou-se no sentido oposto ao movimento do Sol na Eclíptica.
Através de cálculos matemáticos, Kepler descobriu que os planetas descrevem órbitas elípticas e, assim, o levou a formular suas três leis:
$1^a -Lei das órbitas: Todo planeta descreve uma órbita elíptica em torno do Sol, onde este é um dos focos da elipse:
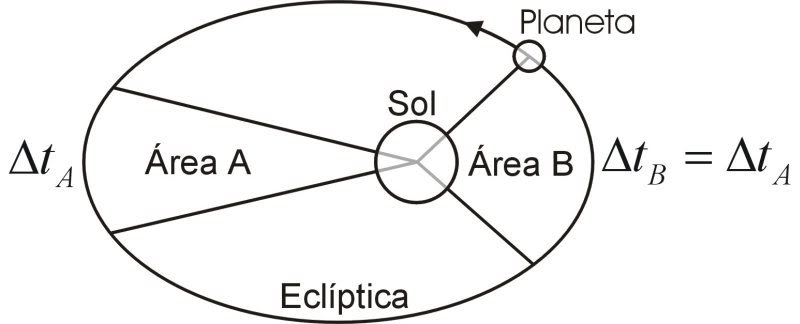
$2^a -$ Lei das áreas: O raio vetor que liga o Sol ao planeta, descreve áreas iguais em intervalos de tempo iguais:
$3^a -$ Lei dos períodos: O quadrado do período do movimento do planeta ao redor do Sol dividido pela distância média do planeta ao Sol elevado ao cubo é uma constante para todos os planetas:
\begin{equation}
k=\frac{T^2}{R^3}
\end{equation}
onde $T$ é o período de revolução do planeta ao redor do Sol, $R$ é a distância média do planeta ao Sol e $k$ é uma constante de proporcionalidade.
Apesar da três leis de Kepler permitirem grandes avanços na Astronomia, havia uma pergunta ainda sem resposta: Que espécie de força o Sol exerce sobre os planetas, obrigando-os a moverem-se de acordo com as leis descobertas por Kepler?
Newton $(1.642-1.727)$ havia descoberto que qualquer variação de velocidade de um corpo em relação a uma aceleração, diferente de zero, está associado a uma força. Com isso formulou sua segunda lei, que diz que uma força aplicada em um corpo é igual ao produto de sua massa pela aceleração sofrida:
\begin{equation}
\overrightarrow{F}=m\cdot a
\end{equation}
onde $F$ é o vetor força, $m$ é a massa do corpo e $a$ é a aceleração da gravidade.
Associando sua segunda lei às leis de Kepler, Newton chegou à lei da Gravitação Universal, que diz que matéria atrai matéria com uma força diretamente proporcional ao produto de suas massas e inversamente proporcional ao quadrado da distância entre elas:
\begin{equation}
\overrightarrow{F}=G \cdot \frac{m_1 \cdot m_2}{d^2}
\end{equation}
onde $F$ é o veotr força, $m_1$ e $m_2$ são as massas dos corpos, $d$ é a distância entre os corpos e $G$ é a constante de proporcionalidade, também chamada de constante gravitacional, não determinada numericamente por Newton. Seu valor foi determinado numericamente em $1.798$ pelo físico inglês Henry Cavendish $(1.731-1.810)$, com o auxílio da balança de rotação de torção de Coulomb, chegando ao valor de:
\begin{equation}
G=6,668 \times 10^{-11}\frac{Nm^2}{kg^2}
\end{equation}
\begin{matrix}
\text{Deslocamento} \: \text{linear}&=& x & \leftrightarrow & \omega& =& \text{Ângulo} \: \text{de} \: \text{rotação}\\
\text{Velocidade} \: \text{linear}&=&v=\frac{dx}{dt}& \leftrightarrow & \omega =\frac{d\theta}{dt}&=&\text{Velocidade}\: \text{angular}
\end{matrix}
Esta analogia é útil para se encontrar uma grandeza análoga à força na dinâmica das rotações. O análogo para a força $\overrightarrow{F}$ para rotações é o torque $\overrightarrow{\tau}$.
Utilizando o trabalho $W$ como forma de encontrar o análogo à força $\overrightarrow{F}$ para rotações, tem-se que, para deslocamentos infinitesimais, numa grandeza linear o trabalho é dado por:
\begin{equation}
\Delta W= \overrightarrow {F} \cdot \Delta x
\end{equation}
onde $\Delta W$ é a variação do trabalho, $\Delta x$ é o deslocamento e $\overrightarrow{F}$ é a força aplicada.
Analogamente, pra rotações têm-se:
\begin{equation}
\Delta W=\overrightarrow{\tau} \cdot \Delta \theta
\end{equation}
onde $\Delta W$ é a variação do trabalho, $\Delta \theta$ é a rotação e $\overrightarrow{\tau}$ é o torque.
Considerando a figura $4$, o ponto $P$ gira em torno do centro $O$ a uma distância $r$ devido à aplicação de uma força $\overrightarrow{F}$ em $P$, formando um ângulo $\varphi$ com a direção de $\overrightarrow{r}$.
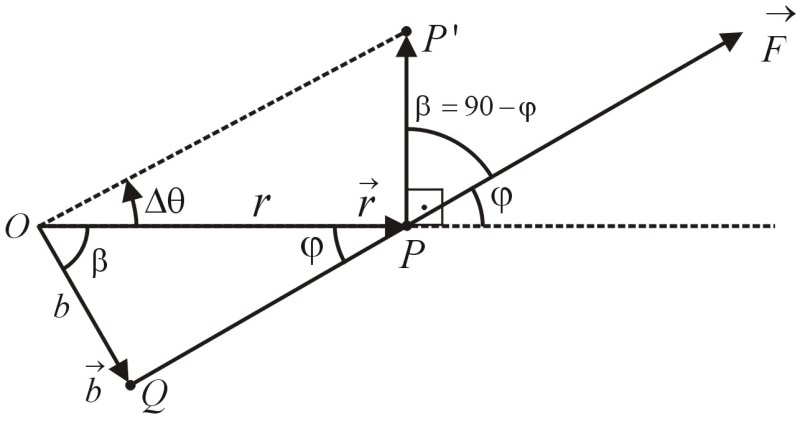
A distância da linha de ação $PQ$ da força em relação ao centro $O$ é chamada de braço de alavanca e é dado por $\overrightarrow{b}$.
Para um deslocamento infinitesimal de $P$ para $P^\prime$ é mais eficaz uma força $\overrightarrow{F}$ perpendicular a $r$ em $P$ para provocar uma rotação, pois se $b$ é tão pequena quanto se queira, a força $\overrightarrow{F}$ se projeta na direção de $\overrightarrow{r}$, tornando-se paralela e sem efeito na rotação.
A projeção de $\overrightarrow{F}$ na direção de $\overrightarrow{PP^\prime}$ é dada por:
\begin{equation}
\overrightarrow{F}=\overrightarrow{F}\cdot \text{sen}(\varphi)
\end{equation}
O deslocamento infinitesimal $\overrightarrow{PP^\prime}$ se confunde com a tangente do círculo de raio $r$ em $P$, portanto:
\begin{equation}
\overrightarrow{PP^\prime}\cong \overrightarrow{r} \cdot \Delta \theta = \Delta x
\end{equation}
Substituindo $(11)$ e $(12)$ em $(9)$, tem-se:
\begin{equation}
\Delta W = \overrightarrow{F} \cdot \text{sen}(\varphi) \overrightarrow{r}\cdot \Delta \theta
\end{equation}
Substituindo $(10)$ em $(13)$, tem-se:
\begin{equation}
\overrightarrow{\tau} \Delta \theta = \overrightarrow{F}\cdot \text{sen}(\varphi) \cdot \overrightarrow{r} \cdot \Delta \theta
\end{equation}
Portanto:
\begin{equation}
\overrightarrow{\tau}= \overrightarrow{F}\cdot \overrightarrow{r} \cdot \text{sen}(\varphi)
\end{equation}
Pela álgebra vetorial, temos que o produto vetorial entre dois vetores gera um terceiro vetor ortogonal aos dois primeiros, definido por:
\begin{equation}
\left | \overrightarrow{w} \right |=\left | \overrightarrow{u}\wedge \overrightarrow{v} \right |= \left | \overrightarrow{u} \right |\cdot \left | \overrightarrow{v} \right |\cdot \text{sen}(\theta)
\end{equation}
Comparando $(15)$ com $(16)$, tem-se:
\begin{equation}
\left | \overrightarrow{\tau} \right |=\left | \overrightarrow{F} \right |\cdot \left | \overrightarrow{r} \right |\cdot \text{sen}(\varphi)
\end{equation}
portanto:
\begin{equation}
\left | \overrightarrow{\tau} \right |=\left | \overrightarrow{F} \wedge \overrightarrow{r} \right |
\end{equation}
O vetor $\overrightarrow{\tau}$ definido em $(18)$ é o torque da força $\overrightarrow{F}$ em $P$ em relação ao centro $O$. Portanto, torque é uma medida de quanto uma força age sobre um determinado corpo de modo a fazê-lo girar em torno de seu eixo.
A medida da eficiência de uma força, no que se refere à tendência de fazer um corpo girar em relação a um ponto fixo, chama-se momento da força em relação a esse ponto. O momento de força depende somente da intensidade da força e do braço de alavanca.
O conceito de momento de força, ou torque, é utilizado freqüentemente em nosso cotidiano. Por exemplo: ao fechar uma porta empurrando-a pela extremidade oposta ao eixo de rotação, a força aplicada será menor do que a aplicada num ponto próximo ao eixo de rotação para obter o mesmo efeito. Portanto, quanto maior for a distância da força aplicada ao eixo de rotação, maior será o momento de força, ou seja, maior será o efeito que ela produz.
Como a Terra é um elipsoide e a distribuição da massa não é muito bem definida, a força gravitacional do Sol tende a ser mais intensa no excesso de massa equatorial, devido à diferença entre o raio equatorial de $6.378km$ e o raio polar de $6.356km$, sendo, portanto, este excesso de $22km$.
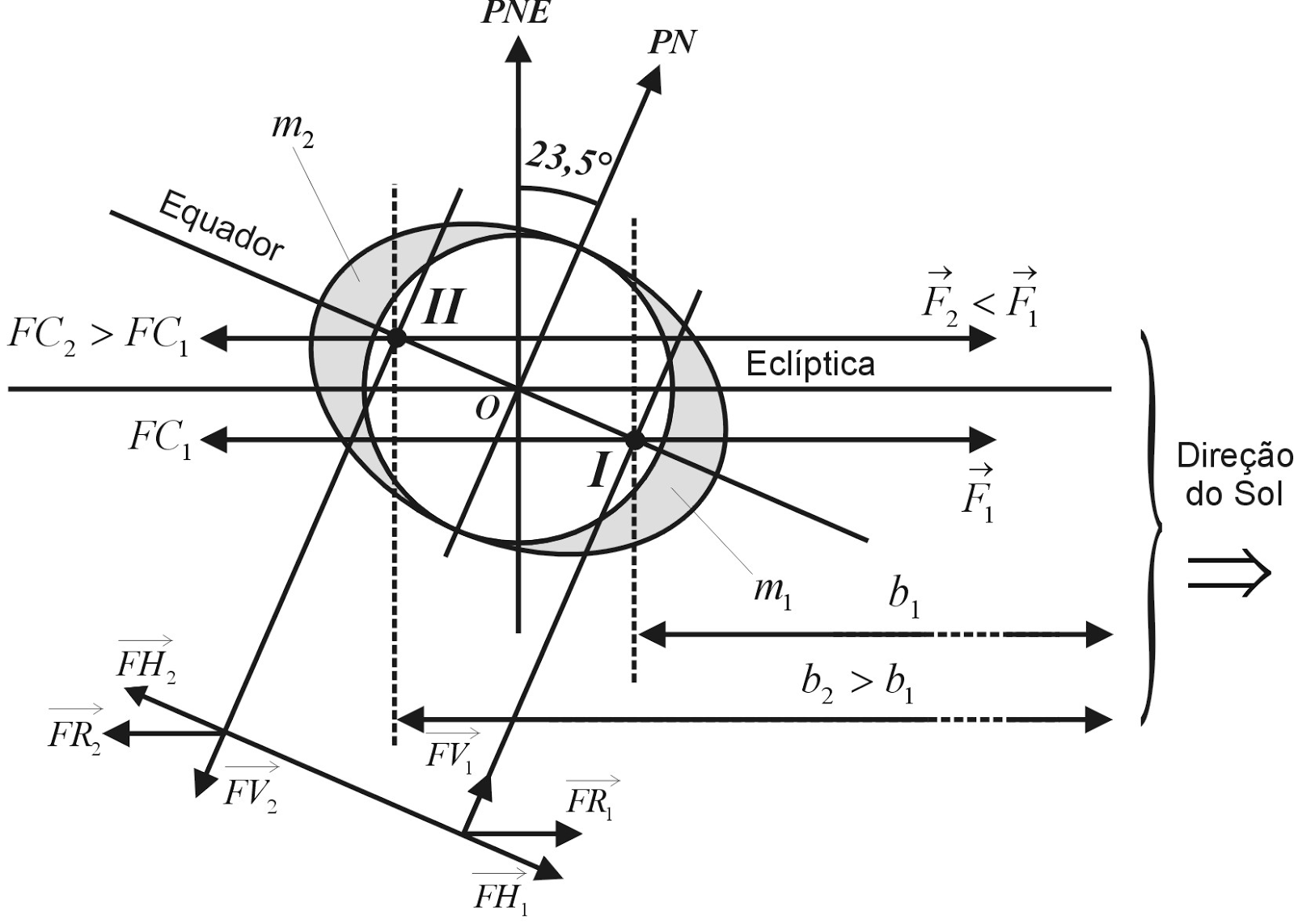
A figura acima esquematiza a interação do Sol com a Terra e as forças agentes sobre a mesma. O ponto $I$ é o centro de massa do hemisfério onde se possui o excesso de massa $m_1$. O ponto $II$ é o centro de massa do hemisfério onde se possui o excesso de massa $m_2$.
Já $b_1$ e $b_2$ são as distâncias respectivas dos pontos $I$ e $II$ em relação ao Sol. As forças $\overrightarrow{F_1}$ e $\overrightarrow{F_2}$ são as forças gravitacionais do Sol agindo nos pontos $I$ e $II$. Devido à distância em que a Terra se encontra em relação ao Sol, as linhas de ação das forças gravitacionais podem ser tomadas como paralelas.
Segundo a Lei da Gravitação Universal de Newton, uma força $\overrightarrow{F}$ diminui de intensidade com o quadrado da distância, portanto $\overrightarrow{F_1}$é maior que $\overrightarrow{F_2}$.
Devido ao movimento de rotação da Terra, a ação destas forças nos pontos $I$ e $II$ geram as forças centrífugas $\overrightarrow{FC_1}$ e $\overrightarrow{FC_2}$.
As forças resultantes desta interação são as forças $\overrightarrow{FR_1}$ e $\overrightarrow{FR_2}$. Decompondo-as em componentes verticais e horizontais, as componentes horizontais $\overrightarrow{FH_1}$ e $\overrightarrow{FH_2}$ tendem a distribuir a massa da terra na região equatorial. As componentes verticais $\overrightarrow{FV_1}$ e $\overrightarrow{FV_2}$ são paralelas entre si e formam um binário exercendo um torque no excesso de massa equatorial da Terra. O momento desta força tende a deslocar o Pólo Norte da Terra de maneira a se alinhar com o Pólo Norte da Eclíptica.
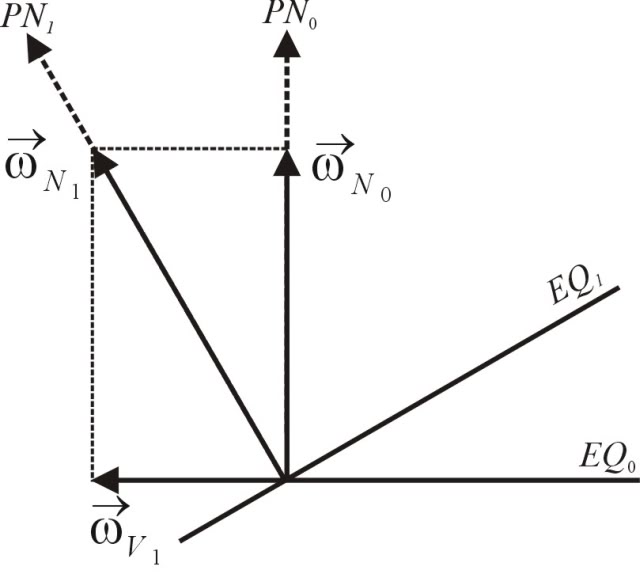
Devido ao movimento de rotação da Terra em torno de seu eixo Norte-Sul é gerado uma velocidade angular denotada por $\overrightarrow{\omega N_0}$. As forças $\overrightarrow{F_1}$ e $\overrightarrow{F_2}$ formam um binário gerando um torque sobre a Terra, conforme mostrado na figura acima, conseqüentemente existem as velocidades angulares correspondentes, denotadas por $\overrightarrow{\omega V_1}$ e $\overrightarrow{\omega V_2}$. Decompondo estas velocidades, a resultante é a velocidade angular $\overrightarrow{\omega N_1}$, conforme mostra a figura abaixo:
Assim, o torque exercido pelas forças gravitacionais do Sol sobre o excesso de massa equatorial da Terra, ocasiona o deslocamento do Pólo Norte $PN_0$ para $PN_1$. O plano do Equador $EQ_0$, por ser perpendicular à $PN_0$, também se desloca, gerando um novo plano do Equador, $EQ_1$, perpendicular a $PN_1$. Consequentemente, o ponto $\gamma_0$ se desloca gerando um novo ponto $\gamma_1$. Este processo gera novos pólos $PN_n$, novos planos $EQ_n$ e novos pontos $\gamma_n$. A projeção dos Pólos $PN_n$ na esfera celeste, conforme mostrado na figura $3$, descreve uma circunferência num período de aproximadamente $26.000$ anos, sendo esta a base de um cone com vértice no centro da Terra.
Sua origem é a mesma da precessão, no entanto, tem a Lua com sua maior influência. Os períodos da nutação variam desde cerca de $182$ dias até cerca de $18,6$ anos.
Pelo fato de seu efeito ser muito menor do que o causado pela precessão, a nutação só foi descoberta em $1.747$ pelo físico inglês James Bradley, que estudava a estrela $\gamma \text{Draconis}$. Notou que esta estrela apresentava variações regulares com oscilações em pequenas amplitudes e pôde confirmar que estas variações não eram exclusiva da estrela $\gamma \text{Draconis}$, mas acontecia em todas as estrelas do sistema referencial.
Ascensão Reta de uma estrela é o ângulo formado entre as retas que ligam o centro da Terra ao ponto $\gamma$ e ao ponto de intersecção do Equador com o meridiano da estrela, denotada por $P$, conforme mostra a figura $8$. A Ascensão Reta varia entre $0^\circ$ e $360^\circ$, medidos no sentido para o Leste. No entanto, por convenção, a Ascensão Reta é medida em unidades de tempo: em horas, minutos e segundos. Com isto, faz-se a relação:
\begin{equation}
\begin{matrix}
360^\circ & = & 24h\\
\alpha & = & 1h
\end{matrix}
\end{equation}
Utilizando uma regra de três simples, encontra-se que $1^h$ equivale a $15^\circ$.
Declinação de uma estrela é o ângulo formado entre as retas que ligam o centro da Terra à estrela e ao ponto de intersecção do Equador com o meridiano da estrela, conforme mostra a figura $8$. A Declinação é medida em graus, minutos e segundos de arco e varia de $–90^\circ$ à $90^\circ$, sendo no Equador igual a $0^\circ$, em direção ao Pólo Norte $\delta > 0$ e em direção ao Pólo Sul, $\delta < 0$. O complemento da declinação é chamado de Distância Polar, denotado por ρ, que é o ângulo formado pelas direções do centro da Terra à estrela e ao Pólo Norte, dado por: $\rho = 90^\circ ─ \delta$.
A precessão causa o deslocamento do ponto $\gamma$ no sentido contrário ao da rotação da Terra, consequentemente este deslocamento causa variações nas coordenadas de Ascensão Reta e Declinação de uma estrela. Estas variações da Ascensão Reta, $\Delta _\alpha$, e Declinação, $\Delta_\delta$∆, são dadas por:
\begin{equation}
\begin{matrix}
\Delta_\alpha & = & \alpha_1 - \alpha_0\\
\Delta_\delta & = & \delta_1 - \delta_0
\end{matrix}
\end{equation}
onde $\alpha_0$ é a ascenção reta relativa a $\gamma_0$, $\alpha_1$ é a escenção reta relativa a $\gamma_1$, $\delta_0$ é declinação relativa a $\gamma_0$ e $\delta_1$ é a declinação relativa a $\gamma_1$.
Os equinócios acontecem quando o Sol, em seu movimento aparente, está sobre os pontos de intersecção dos planos da Eclíptica com o do Equador, passando do Hemisfério Sul para o Norte no equinócio de outono, em março e do hemisfério Norte para o Sul no equinócio de primavera, em setembro. Esses pontos são chamados de ponto vernal ou ponto $\gamma$ e ponto $\Omega$, respectivamente.
Como a precessão causa o deslocamento do ponto vernal no sentido contrário ao da rotação da Terra, os pontos equinociais se deslocam de modo a se antecipar com o tempo. A figura $9$ mostra a variação do equinócio tendo como referência os anos de $1.975$ e $2.000$:
A Ascensão Reta da estrela aumentou em $1^m,28$, equivalente a $0,32^\circ$, ou seja, aumentou $19^\prime 12^{\prime \prime}$. A Declinação da estrela aumentou $8^\prime ,4$, ou seja, aumentou $8^\prime 24^{\prime \prime}$.
A tabela abaixo mostra as coordenadas do Sol nos equinócios:
Na Astrologia, os signos zodiacais foram designados pelos nomes das constelações por Hiparco, divididos em $12$ partes e seqüenciados a partir do ponto vernal. Na época, a constelação observada no equinócio de março, era a de Áries. Como a precessão causa a antecipação do ponto vernal, hoje nos equinócios de março a constelação vigente é a de Peixes. Portanto, as constelações zodiacais observadas nos equinócios mudam a cada $2.000$ anos, aproximadamente, antecipando lentamente o conjunto dos signos.
\begin{equation}
\begin{matrix}
\frac{d\delta}{dt}=N\cdot \cos(\alpha)\\
\frac{d\alpha}{dt}=M+N\cdot \text{sen}(\alpha)\cdot\text{tg}(\delta)
\end{matrix}
\end{equation}
As fórmulas e os valores para $M$ e $N$ dados acima são válidos para um prazo de $20$ anos, centrados no ano $2.000$. São dados pelo The Astronomical Almanac, publicado por U. S. Nautical Almanac Office nos Estados Unidos (UNNO) e Her Majesty's Nauticali no Reino Unido (HMNAO), conforme SANTIAGO, $(2005, p.76)$. As variações para $\alpha$ e $\delta$ são dadas em segundos de tempo e segundos de arco, respectivamente.
Em $18.62$ descobriu-se que Sirius é na verdade um sistema binário. A estrela principal é aquela visível no céu e é chamada de Sirius $A$. Possui uma luminosidade de $23$ vezes maior que a do Sol e sua massa é cerca de $2,1$ massas solares. Sua companheira, muito menos brilhante, é a Sirius $B$ e foi a primeira estrela anã branca a ser descoberta, possuindo uma massa aproximadamente igual à do Sol, mas com diâmetro cerca de $50$ vezes menor.
Dadas as coordenadas de Ascensão Reta e Declinação de Sirius no ano $2.000$:
\begin{equation}
\begin{matrix}
\alpha &=& 06^h \: 45^m \: 08,9^s\\
\delta &=& -16^\circ \: 42^\prime \: 58^{\prime \prime}
\end{matrix}
\end{equation}
Para observar a estrela no ano de 2007, será preciso ajustar as coordenadas do telescópio devido às variações causadas pela precessão.
O primeiro passo é transformar suas coordenadas para graus decimais. Para a Ascensão Reta, faz-se:
\begin{equation}
\begin{matrix}
\alpha = 06^h \: 45^m \: 08,9^s\\
\alpha = 06 + \frac{45}{60} +\frac{08,9}{3600}\\
\alpha = 6,7524722^\circ
\end{matrix}
\end{equation}
Como $1^h$ equivaçe a $15^\circ$, multiplica-se o valor de $\alpha$ por $15$, encontrando:
\begin{equation}
\alpha = 101,2870833^\circ
\end{equation}
Para a Declinação, faz-se:
\begin{equation}
\begin{matrix}
\delta = -16^\circ \: 42^\prime \: 58^{\prime \prime}\\
\delta = -\left( 16+ \frac{42}{60} + \frac{58}{3600}\right)\\
\delta = -16,716111^\circ
\end{matrix}
\end{equation}
Para calculara correção da Ascensão Reta, faz-se
\begin{equation}
\begin{matrix}
\frac{d\alpha}{dt}=M+N\cdot \text{sen}(\alpha)\cdot\text{tg}(\delta) \\
\frac{d\alpha}{dt}=3,07419+20,0383\cdot\text{sen}(101,2870833)\cdot \text{tg}(-16,716111)\\
\frac{d\alpha}{dt}=-2,827336605 \cong -2,83 \:s/ano
\end{matrix}
\end{equation}
Para calcular a correção da coordenada de Declinação, faz-se:
\begin{equation}
\begin{matrix}
\frac{d\delta}{dt}=N\cdot \cos(\alpha)\\
\frac{d\delta}{dt}=20,0383 \cdot \cos(101,2870833)\\
\frac{d\delta}{dt}=-3,921997578^{\prime \prime} \cong -3,922 \:^{\prime \prime}/ano
\end{matrix}
\end{equation}
Estes valores encontrados são as variações das coordenadas referentes a $1$ ano. Como deseja-se saber a variação em $7$ anos, multiplica-se estes valores por $7$. encontrando:
\begin{equation}
\Delta \alpha = -19,81^s\\
\Delta \delta = -27,454^{\prime \prime}
\end{equation}
onde $\Delta \alpha$ é a variação da coordenada de Ascensão Reta em $7$ anos e $\Delta \delta$ é a variação da coordenada de Declinação em $7$ anos.
Para computar as coordenadas para o ano de $2.007$, estas variações devem-se ser adicionadas às coordenadas do ano $2.000$:
\begin{equation*}
\alpha_{2000}+\Delta \alpha = \alpha_{2007} \Rightarrow 06^h45^m08,9^s-19,81^s=06^h44^m49,09^s\\
\delta_{2000}+\Delta \delta=\delta_{2007} \Rightarrow-16^\circ42^\prime58^{\prime \prime}-27,454^{\prime \prime}=-16^\circ 43^\prime 25,45^{\prime \prime}
\end{equation*}
Portanto, as coordenadas da estrela Sirius em $2.007$ serão:
\begin{equation}
\begin{matrix}
\alpha&=&06^h44^m49,09^s\\
\delta&=&16^\circ 43^\prime 25,45^{\prime \prime}
\end{matrix}
\end{equation}
Verificou-se, então, que a precessão é causada pelas forças gravitacionais do Sol, que geram um torque na Terra, deslocando seus pólos, o plano do Equador e, consequentemente, o ponto $\gamma$, que se desloca lentamente num sentido retrógrado ao movimento de rotação da Terra. Esta retrogradação provoca a mudança do céu observado, causando alterações nas coordenadas equatoriais de um astro e a antecipação dos equinócios.
Devido ao movimento de precessão da Terra ser muito lento, onde um ciclo leva cerca de $26.000$ anos, seus efeitos são imperceptíveis para um observador na Terra. No entanto, para um astrônomo observar um astro qualquer é necessário ajustar as coordenadas em seu telescópio para corrigir as variações causadas pela precessão.
Logo, os efeitos causados pela precessão influem somente em questões observacionais, não afetando a vida terrestre.
➋ As Velocidades da Terra
➌ A Lei da Gravitação Universal e o Campo Gravitacional

- Teorema Do Quadrilátero Inscritível
Um quadrilátero está inscrito numa circunferência se seus vértices são pontos desta circunferência. Teorema: Se um quadrilátero é inscritível numa circunferência, então os ângulos opostos são suplementares. Por hipóteses temos que o quadrilátero...
- Retas Perpendiculares
Veremos nesta postagem como determinar se duas retas são perpendiculares entre si, dados seus coeficientes angulares.Considere duas retas $r_1$ e $r_2$ não perpendiculares a nenhum dos eixos $x$ e $y$. Sejam $m_1$ e $m_2$ os coeficientes angulares das...
- Os Pontos De Brocard (parte 3)
Vimos na primeira postagem desta série sobre os Pontos de Brocard as definições e suas construções geométricas. Na segunda postagem, vimos algumas propriedades importantes, teoremas e corolários. Nesta terceira parte, veremos outros teoremas igualmente...
- As Velocidades Da Terra
Sabemos que a Terra executa alguns movimentos no decorrer de sua órbita ao redor do Sol. Vamos destacar os principais: Rotação e Translação. Vamos determinar as velocidades em que a Terra desenvolve em cada um desses movimentos. Movimento de RotaçãoA...
- Demonstração Da Derivada Da Função Logarítmica
Neste artigo, veremos uma demonstração de como encontrar a derivada da função logarítmica usando o conceito de derivada e limites. Iremos provar que, se $ f(x) = \ln(x)$, então sua derivada será $\displaystyle f'(x) = \frac{1}{x}$. Demonstração:Seja...
Matemática
O Movimento de Precessão da Terra e Algumas Implicações
Este estudo fiz para meu TCC na graduação em Licenciatura em Matemática. Deu um pouco de trabalho, levei cerca de $18$ meses em pesquisas, desenvolvimento e formatação. Espero que apreciem.
$1 -$ Sinopse
Durante o movimento orbital da Terra, seu eixo de rotação, inclinado cerca de $23,5^\circ$ em relação ao seu plano de órbita, não permanece exatamente apontado para uma mesma direção no espaço, deslocando-se lentamente em torno da Eclíptica, descrevendo a superfície de um cone com vértice no centro da Terra. Este movimento é chamado de precessão e é causado pela ação das forças gravitacionais do Sol sobre o excesso de massa equatorial, gerando um torque sobre a Terra.Devido ao ciclo da precessão ser lento, cerca de $26.000$ anos, seus efeitos também os são, causando o deslocamento do ponto vernal, antecipação dos equinócios e a constante alteração das coordenadas de um astro qualquer.
$2 -$ Introdução
Com este estudo, pretende-se abordar a teoria que envolve o movimento de precessão da Terra, assim como cálculos matemáticos que levam ao mesmo, demonstrando sua origem física, cujo efeito pode ser explicado pela ação de torques causados pelo Sol sobre o bojo equatorial da Terra, e consequências no decorrer dos anos, visto que a Terra não é uma esfera perfeita causando, por exemplo, o deslocamento dos pólos que descreve a superfície de um cone, alterando, assim, o céu observado.A Terra não está fixa no espaço e sim em constante movimento. Alguns de seus movimentos são simples de observar, como o movimento de rotação e de translação. Outros, porém, por serem lentos, escapam à percepção. Dos principais movimentos pode-se destacar:
$\bullet$ Movimento de rotação: A Terra gira em torno de seu eixo, inclinado cerca de $23,5^\circ$ em relação ao plano de sua órbita, com a duração de $1$ dia, cerca de $24$ horas.
$\bullet$ Movimento de translação ou revolução: É movimento da Terra em sua órbita elíptica em torno do Sol, com duração de $1$ ano, cerca de $365$ dias.
$\bullet$ Movimento no espaço: O Sol não está fixo, deslocando-se pelo espaço sideral, arrastando consigo todo o sistema planetário, na direção de um ponto chamado Ápex, situado na constelação de Lira.
$\bullet$ Movimento de precessão: É o movimento do eixo da Terra girando em torno do eixo da Eclíptica, com duração de aproximadamente $26.000$ anos.
Ao fato desse movimento causar o deslocamento, lento, mas gradual, do eixo da Terra, seus efeitos e conseqüências também os são, que, para um observador na Terra, se tornam imperceptíveis, portanto, alguns efeitos serão estudados para verificar se o movimento de precessão da Terra influi na vida terrestre.
$3 -$ Precedentes
A longitude de uma estrela é o ângulo formado entre a reta que liga a Terra a ela própria e a reta que liga a Terra ao ponto $\gamma$, que é a intersecção do plano do Equador Celeste com o plano da Eclíptica, onde o Sol passa do hemisfério Sul para o Norte.Antigamente não era possível sua determinação, pois para a medida deste ângulo seria necessária a observação do ponto $\gamma$, que, sendo puramente geométrico, não pode ser observado.
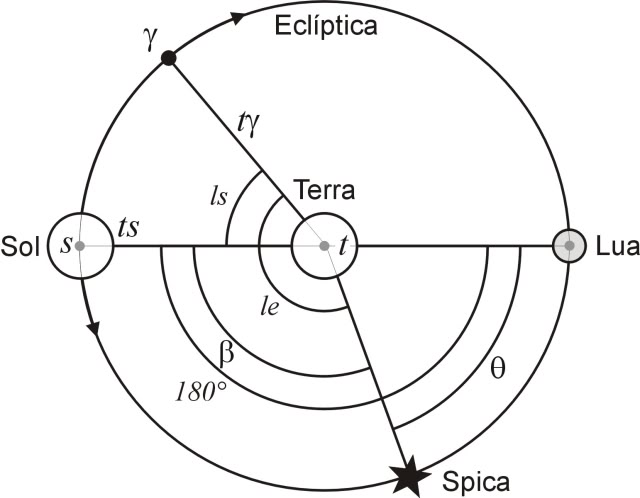
No ano de $273\: a.C.$, o astrônomo e filósofo grego Timocharis $(320-260\: a.C.)$ efetuou a medida da longitude da estrela Spica $(\alpha \text{Virginis})$ utilizando-se de um eclipse lunar. Timocharis sabia que durante um eclipse lunar, o Sol forma com a Lua um ângulo de $180^\circ $ e, assim, pode-se medir o ângulo $\theta$ formado pela Lua e a estrela conforme mostra a figura $1$:
[Figura $1-$ Esquema utilizado por Timocharis]
Sabia também o dia em que o Sol passava pelo ponto $\gamma$ e que a Terra descreve uma volta completa em torno do Sol em $1$ ano. Com isso, determinou a longitude do Sol da seguinte forma:
Como $t_s - t_\gamma= l_s$ e a revolução da Terra em torno do Sol descreve um arco de $360^\circ$, tem-se a relação:
\begin{equation}
\begin{matrix}
1\: \text{ano}=360^\circ \\
(t_s-t_\gamma)=l_s
\end{matrix}
\end{equation}
onde $t_s$ é a reta que liga a Terra ao Sol, $t_\gamma$ é a reta que liga a Terra ao ponto $\gamma$ e $l_s$ é a latitude do Sol.
Como $1$ ano equivale a $365,212199$ dias, substituindo na relação acima e com um regra de três simples chega-se à relação:
\begin{equation}
l_s=\frac{(t_s-t_\gamma)\cdot 360^\circ}{365,242199}
\end{equation}
Sendo $\beta$ o ângulo entre o Sol e a estrela Spica e $\theta$ o ângulo entre a estrela Spica e a Lua, medido no instante do eclipse lunar, temos que:
\begin{equation}
\beta=180^\circ - \theta
\end{equation}
Com $\beta$ e $l_s$ medidos, determinou-se a longitude da estrela, dada por $l_e$:
\begin{equation}
l_e=l_s + \beta
\end{equation}
Utilizando-se do eclipse lunar, Timocharis efetuou a medida da longitude da estrela Spica, encontrando um valor de $l_e = 172^\circ$.
No ano de $129\: a.C.$, a exatos $144$ anos após a medida de Timocharis, o astrônomo e matemático grego Hiparco refez a mesma medida utilizando-se do mesmo procedimento de Timocharis, encontrando um valor de $l_e = 174^\circ$. Verificou-se, então, uma variação de $2^\circ$ em $144$ anos, resultando $50^{\prime \prime}$ por ano.
A precessão se dá pela mudança do ponto em que o percurso aparente do Sol intercepta o Equador Celeste, se antecipando com o tempo, daí o nome precessão. Assim, Hiparco descobriu que o Sol não está sempre na mesma posição do zodíaco quando ocorrem os equinócios, sendo esta sua maior descoberta científica.
Hiparco viveu na cidade de Alexandria, mas trabalhou, sobretudo, em Rodes, onde construiu um observatório através do qual compilou um catálogo com a posição e a magnitude de $850$ estrelas do firmamento.
$4 -$ Manifestação da precessão
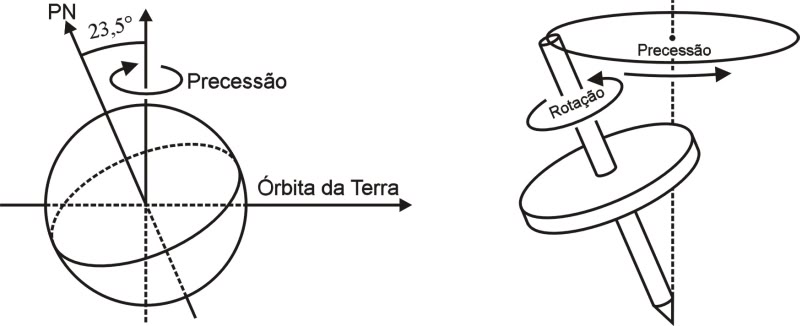
A precessão se manifesta num movimento do eixo Norte-Sul da Terra, em forma da superfície de um cone, coincidindo o vértice do cone com o centro da Terra. Este é o resultado da inclinação do eixo terrestre, cerca de $23,5^\circ$ (exatamente $23^\circ 27^\prime 08^{\prime \prime}$), contra o plano de sua órbita em torno do Sol, combinado ao fator de que a Terra não é uma esfera perfeita e sim achatada nos pólos.Assim, a força gravitacional do Sol é mais intensa no excesso de massa equatorial, tendendo a endireitá-la. Devido ao movimento de rotação, o efeito resultante é uma lenta mudança de direção do eixo axial no espaço, mudando os pólos celestes. O movimento é similar ao de um pião, figura $2$, que, ao girar, bamboleia em torno de seu eixo, contudo, lento e gradual. No caso da Terra, um ciclo completo leva cerca de $26.000$ anos.
[Figura $2-$ Comparação entre o movimento da Terra e o movimento de um pião]
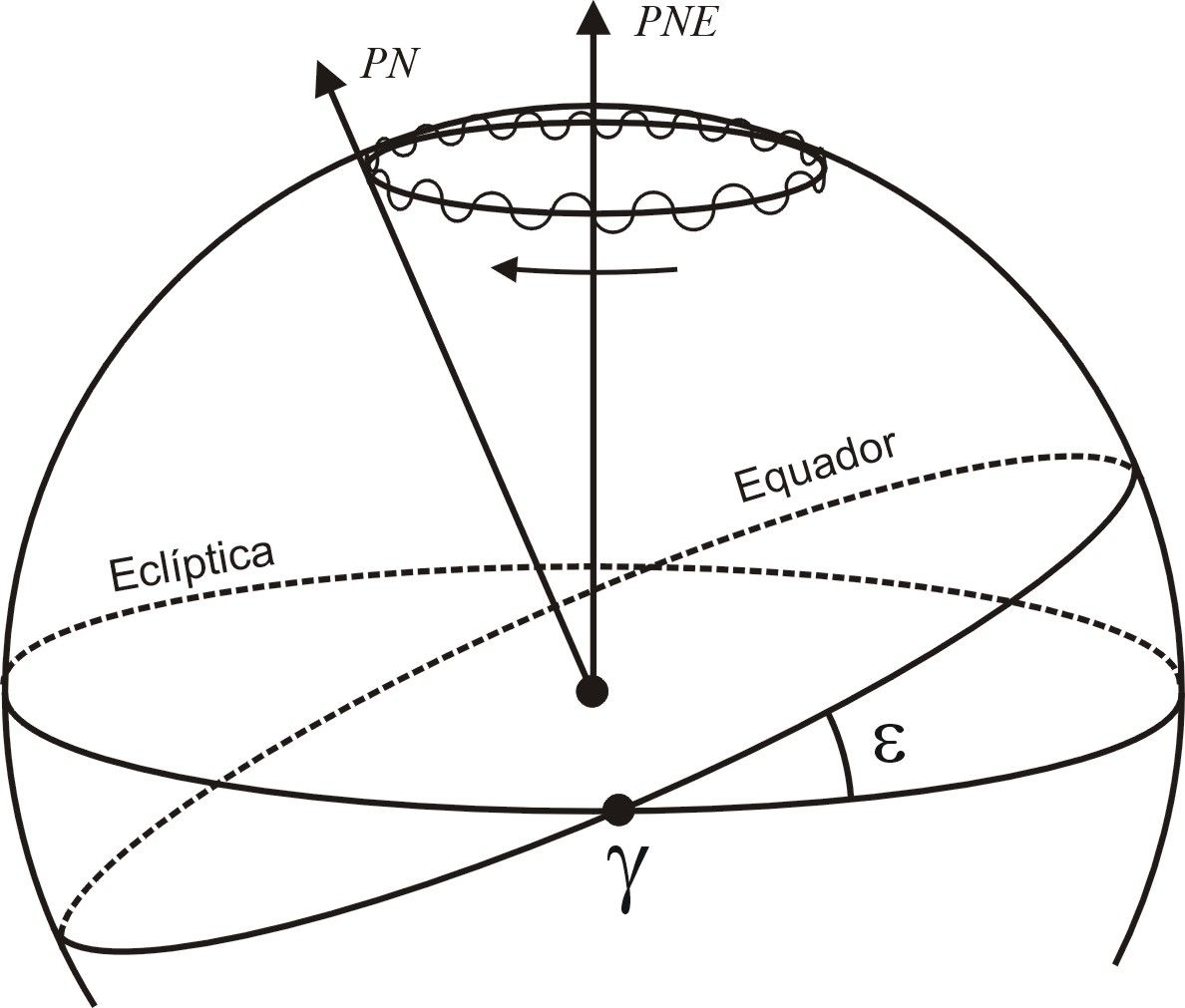
$4.1 -$ Explicação Geométrica da Precessão
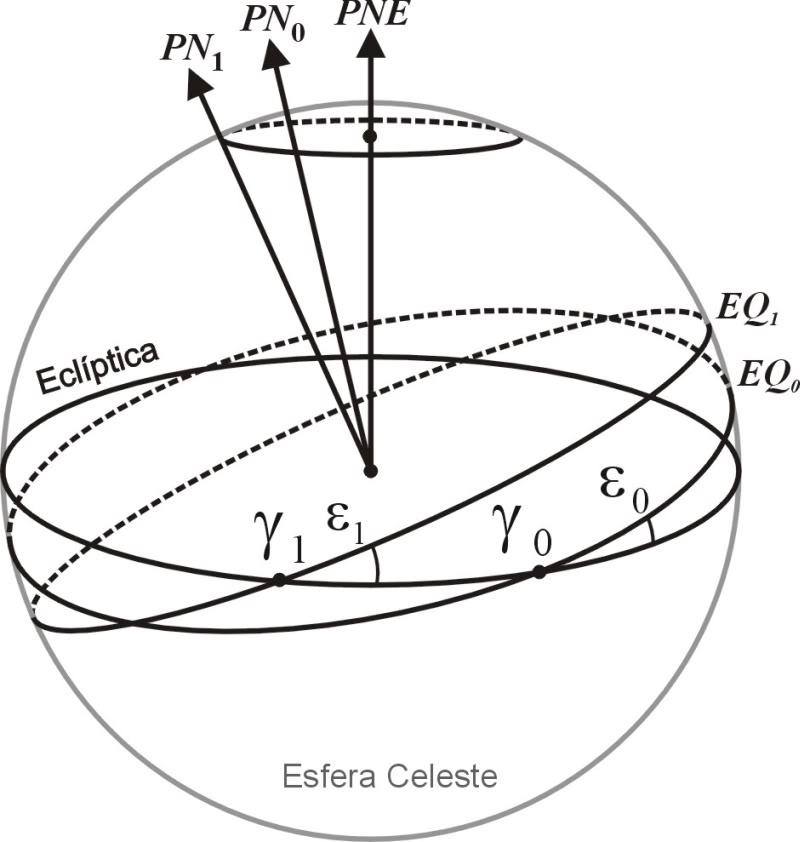
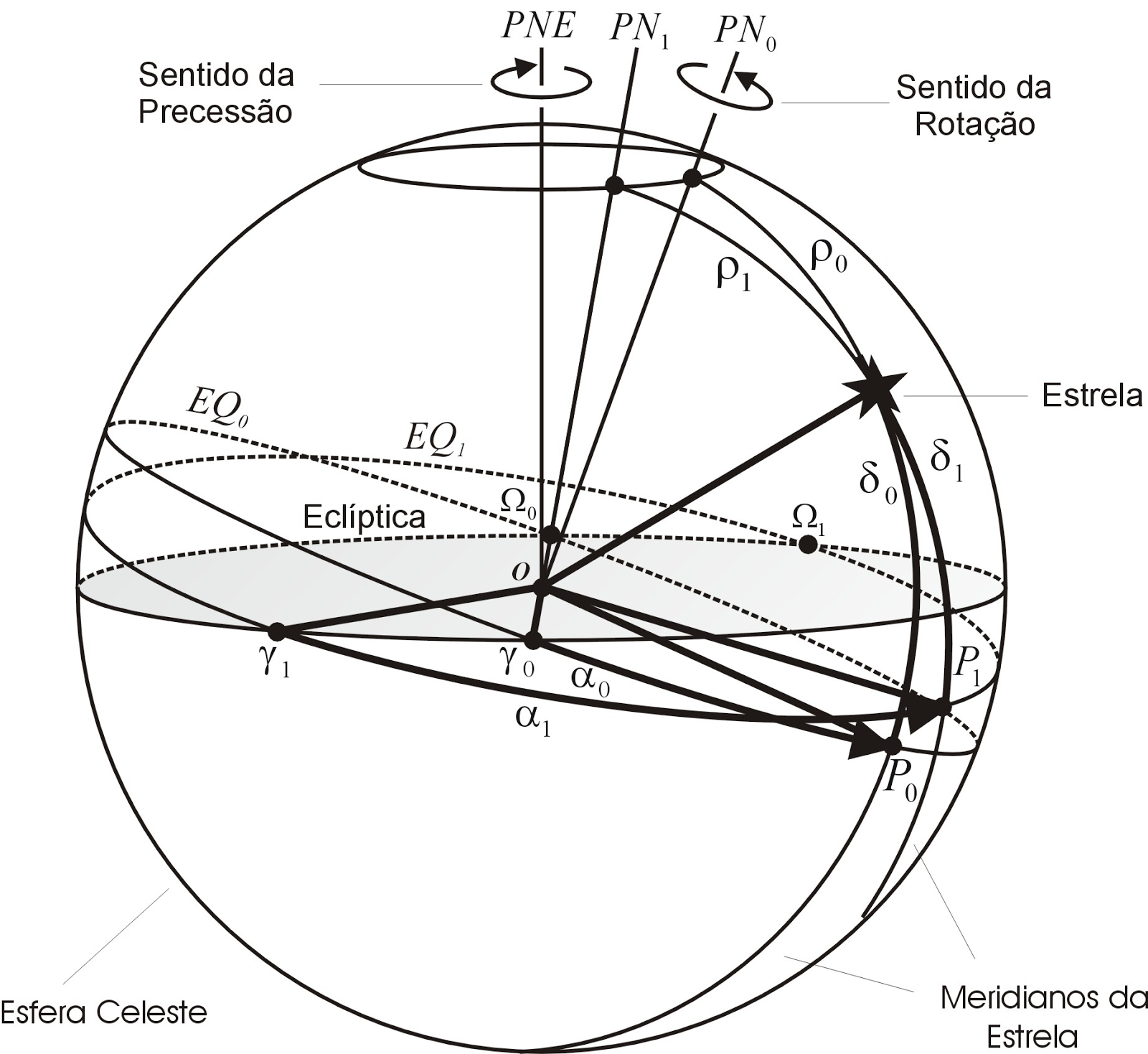
Adotando, conforme mostra a figura $3$, $PN_0$ como Pólo Norte, que é a direção do eixo ortogonal ao plano do Equador $EQ_0$, e $PN_E$ como Pólo Norte da Eclíptica, que é o eixo ortogonal ao plano da Eclíptica, o ponto $\gamma_0$ é o vértice do ângulo de obliqüidade $\varepsilon_0$ formado entre os planos do Equador $EQ_0$ e da Eclíptica. Quando o ponto $\gamma$ se desloca, surge um novo plano do Equador $EQ_1$, originando um novo Pólo Norte correspondente $PN_1$. Consequentemente, surgirá um novo ângulo de obliqüidade, $\varepsilon _1=\varepsilon_0$, entre os planos da Eclíptica e do Equador $EQ_1$, sendo o ponto $\gamma_1$ o vértice. Este processo se repete continuamente, originando infinitos planos do Equador $EQ_N$, Pólos Norte $PN_N$ e pontos $\gamma_N$ até completar um ciclo de $360^\circ$ e recomeçar novamente.[Figura $3-$ Explicação geométrica da precessão]
Analisando geometricamente, nota-se que houve uma retrogradação do ponto $\gamma$, ou seja, o ponto $\gamma$ deslocou-se no sentido oposto ao movimento do Sol na Eclíptica.
$4.2 -$ Explicação Física da Precessão
Para o estudo físico da precessão, será preciso uma pequena digressão, onde será abordado: A Lei da Gravitação Universal e Momento de Força ou Torque.$4.2.1 -$ A Lei da Gravitação Universal
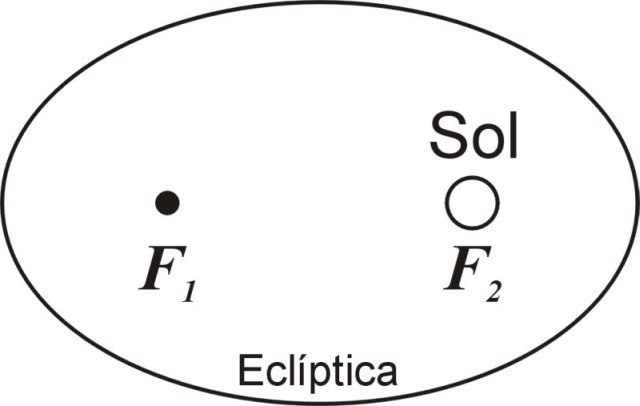
Johanes Kepler $(1.571-1.630)$ foi um grande conhecedor de matemática e dedicou a maior parte de sua vida à análise das posições dos planetas.Através de cálculos matemáticos, Kepler descobriu que os planetas descrevem órbitas elípticas e, assim, o levou a formular suas três leis:
$1^a -Lei das órbitas: Todo planeta descreve uma órbita elíptica em torno do Sol, onde este é um dos focos da elipse:
$2^a -$ Lei das áreas: O raio vetor que liga o Sol ao planeta, descreve áreas iguais em intervalos de tempo iguais:
$3^a -$ Lei dos períodos: O quadrado do período do movimento do planeta ao redor do Sol dividido pela distância média do planeta ao Sol elevado ao cubo é uma constante para todos os planetas:
\begin{equation}
k=\frac{T^2}{R^3}
\end{equation}
onde $T$ é o período de revolução do planeta ao redor do Sol, $R$ é a distância média do planeta ao Sol e $k$ é uma constante de proporcionalidade.
Apesar da três leis de Kepler permitirem grandes avanços na Astronomia, havia uma pergunta ainda sem resposta: Que espécie de força o Sol exerce sobre os planetas, obrigando-os a moverem-se de acordo com as leis descobertas por Kepler?
Newton $(1.642-1.727)$ havia descoberto que qualquer variação de velocidade de um corpo em relação a uma aceleração, diferente de zero, está associado a uma força. Com isso formulou sua segunda lei, que diz que uma força aplicada em um corpo é igual ao produto de sua massa pela aceleração sofrida:
\begin{equation}
\overrightarrow{F}=m\cdot a
\end{equation}
onde $F$ é o vetor força, $m$ é a massa do corpo e $a$ é a aceleração da gravidade.
Associando sua segunda lei às leis de Kepler, Newton chegou à lei da Gravitação Universal, que diz que matéria atrai matéria com uma força diretamente proporcional ao produto de suas massas e inversamente proporcional ao quadrado da distância entre elas:
\begin{equation}
\overrightarrow{F}=G \cdot \frac{m_1 \cdot m_2}{d^2}
\end{equation}
onde $F$ é o veotr força, $m_1$ e $m_2$ são as massas dos corpos, $d$ é a distância entre os corpos e $G$ é a constante de proporcionalidade, também chamada de constante gravitacional, não determinada numericamente por Newton. Seu valor foi determinado numericamente em $1.798$ pelo físico inglês Henry Cavendish $(1.731-1.810)$, com o auxílio da balança de rotação de torção de Coulomb, chegando ao valor de:
\begin{equation}
G=6,668 \times 10^{-11}\frac{Nm^2}{kg^2}
\end{equation}
$4.2.2 -$ Torque
Do ponto de vista cinemático, pode-se fazer uma analogia entre as grandezas lineares e angulares:\begin{matrix}
\text{Deslocamento} \: \text{linear}&=& x & \leftrightarrow & \omega& =& \text{Ângulo} \: \text{de} \: \text{rotação}\\
\text{Velocidade} \: \text{linear}&=&v=\frac{dx}{dt}& \leftrightarrow & \omega =\frac{d\theta}{dt}&=&\text{Velocidade}\: \text{angular}
\end{matrix}
Esta analogia é útil para se encontrar uma grandeza análoga à força na dinâmica das rotações. O análogo para a força $\overrightarrow{F}$ para rotações é o torque $\overrightarrow{\tau}$.
Utilizando o trabalho $W$ como forma de encontrar o análogo à força $\overrightarrow{F}$ para rotações, tem-se que, para deslocamentos infinitesimais, numa grandeza linear o trabalho é dado por:
\begin{equation}
\Delta W= \overrightarrow {F} \cdot \Delta x
\end{equation}
onde $\Delta W$ é a variação do trabalho, $\Delta x$ é o deslocamento e $\overrightarrow{F}$ é a força aplicada.
Analogamente, pra rotações têm-se:
\begin{equation}
\Delta W=\overrightarrow{\tau} \cdot \Delta \theta
\end{equation}
onde $\Delta W$ é a variação do trabalho, $\Delta \theta$ é a rotação e $\overrightarrow{\tau}$ é o torque.
Considerando a figura $4$, o ponto $P$ gira em torno do centro $O$ a uma distância $r$ devido à aplicação de uma força $\overrightarrow{F}$ em $P$, formando um ângulo $\varphi$ com a direção de $\overrightarrow{r}$.
[Figura $4-$ Esquema representativo do torque]
A distância da linha de ação $PQ$ da força em relação ao centro $O$ é chamada de braço de alavanca e é dado por $\overrightarrow{b}$.
Para um deslocamento infinitesimal de $P$ para $P^\prime$ é mais eficaz uma força $\overrightarrow{F}$ perpendicular a $r$ em $P$ para provocar uma rotação, pois se $b$ é tão pequena quanto se queira, a força $\overrightarrow{F}$ se projeta na direção de $\overrightarrow{r}$, tornando-se paralela e sem efeito na rotação.
A projeção de $\overrightarrow{F}$ na direção de $\overrightarrow{PP^\prime}$ é dada por:
\begin{equation}
\overrightarrow{F}=\overrightarrow{F}\cdot \text{sen}(\varphi)
\end{equation}
O deslocamento infinitesimal $\overrightarrow{PP^\prime}$ se confunde com a tangente do círculo de raio $r$ em $P$, portanto:
\begin{equation}
\overrightarrow{PP^\prime}\cong \overrightarrow{r} \cdot \Delta \theta = \Delta x
\end{equation}
Substituindo $(11)$ e $(12)$ em $(9)$, tem-se:
\begin{equation}
\Delta W = \overrightarrow{F} \cdot \text{sen}(\varphi) \overrightarrow{r}\cdot \Delta \theta
\end{equation}
Substituindo $(10)$ em $(13)$, tem-se:
\begin{equation}
\overrightarrow{\tau} \Delta \theta = \overrightarrow{F}\cdot \text{sen}(\varphi) \cdot \overrightarrow{r} \cdot \Delta \theta
\end{equation}
Portanto:
\begin{equation}
\overrightarrow{\tau}= \overrightarrow{F}\cdot \overrightarrow{r} \cdot \text{sen}(\varphi)
\end{equation}
Pela álgebra vetorial, temos que o produto vetorial entre dois vetores gera um terceiro vetor ortogonal aos dois primeiros, definido por:
\begin{equation}
\left | \overrightarrow{w} \right |=\left | \overrightarrow{u}\wedge \overrightarrow{v} \right |= \left | \overrightarrow{u} \right |\cdot \left | \overrightarrow{v} \right |\cdot \text{sen}(\theta)
\end{equation}
Comparando $(15)$ com $(16)$, tem-se:
\begin{equation}
\left | \overrightarrow{\tau} \right |=\left | \overrightarrow{F} \right |\cdot \left | \overrightarrow{r} \right |\cdot \text{sen}(\varphi)
\end{equation}
portanto:
\begin{equation}
\left | \overrightarrow{\tau} \right |=\left | \overrightarrow{F} \wedge \overrightarrow{r} \right |
\end{equation}
O vetor $\overrightarrow{\tau}$ definido em $(18)$ é o torque da força $\overrightarrow{F}$ em $P$ em relação ao centro $O$. Portanto, torque é uma medida de quanto uma força age sobre um determinado corpo de modo a fazê-lo girar em torno de seu eixo.
A medida da eficiência de uma força, no que se refere à tendência de fazer um corpo girar em relação a um ponto fixo, chama-se momento da força em relação a esse ponto. O momento de força depende somente da intensidade da força e do braço de alavanca.
O conceito de momento de força, ou torque, é utilizado freqüentemente em nosso cotidiano. Por exemplo: ao fechar uma porta empurrando-a pela extremidade oposta ao eixo de rotação, a força aplicada será menor do que a aplicada num ponto próximo ao eixo de rotação para obter o mesmo efeito. Portanto, quanto maior for a distância da força aplicada ao eixo de rotação, maior será o momento de força, ou seja, maior será o efeito que ela produz.
$5 -$ Forças de ação na Terra
Admitindo somente a interação gravitacional do Sol com a Terra e esta sendo uma esfera homogênea, a força gerada por esta interação seria uma força aplicada no centro da Terra, sem efeito de rotação.Como a Terra é um elipsoide e a distribuição da massa não é muito bem definida, a força gravitacional do Sol tende a ser mais intensa no excesso de massa equatorial, devido à diferença entre o raio equatorial de $6.378km$ e o raio polar de $6.356km$, sendo, portanto, este excesso de $22km$.
[Figura $5-$ Forças agentes na Terra]
A figura acima esquematiza a interação do Sol com a Terra e as forças agentes sobre a mesma. O ponto $I$ é o centro de massa do hemisfério onde se possui o excesso de massa $m_1$. O ponto $II$ é o centro de massa do hemisfério onde se possui o excesso de massa $m_2$.
Já $b_1$ e $b_2$ são as distâncias respectivas dos pontos $I$ e $II$ em relação ao Sol. As forças $\overrightarrow{F_1}$ e $\overrightarrow{F_2}$ são as forças gravitacionais do Sol agindo nos pontos $I$ e $II$. Devido à distância em que a Terra se encontra em relação ao Sol, as linhas de ação das forças gravitacionais podem ser tomadas como paralelas.
Segundo a Lei da Gravitação Universal de Newton, uma força $\overrightarrow{F}$ diminui de intensidade com o quadrado da distância, portanto $\overrightarrow{F_1}$é maior que $\overrightarrow{F_2}$.
Devido ao movimento de rotação da Terra, a ação destas forças nos pontos $I$ e $II$ geram as forças centrífugas $\overrightarrow{FC_1}$ e $\overrightarrow{FC_2}$.
As forças resultantes desta interação são as forças $\overrightarrow{FR_1}$ e $\overrightarrow{FR_2}$. Decompondo-as em componentes verticais e horizontais, as componentes horizontais $\overrightarrow{FH_1}$ e $\overrightarrow{FH_2}$ tendem a distribuir a massa da terra na região equatorial. As componentes verticais $\overrightarrow{FV_1}$ e $\overrightarrow{FV_2}$ são paralelas entre si e formam um binário exercendo um torque no excesso de massa equatorial da Terra. O momento desta força tende a deslocar o Pólo Norte da Terra de maneira a se alinhar com o Pólo Norte da Eclíptica.
Devido ao movimento de rotação da Terra em torno de seu eixo Norte-Sul é gerado uma velocidade angular denotada por $\overrightarrow{\omega N_0}$. As forças $\overrightarrow{F_1}$ e $\overrightarrow{F_2}$ formam um binário gerando um torque sobre a Terra, conforme mostrado na figura acima, conseqüentemente existem as velocidades angulares correspondentes, denotadas por $\overrightarrow{\omega V_1}$ e $\overrightarrow{\omega V_2}$. Decompondo estas velocidades, a resultante é a velocidade angular $\overrightarrow{\omega N_1}$, conforme mostra a figura abaixo:
[Figura $6-$ Decomposição das velocidades angulares agentes na Terra]
Assim, o torque exercido pelas forças gravitacionais do Sol sobre o excesso de massa equatorial da Terra, ocasiona o deslocamento do Pólo Norte $PN_0$ para $PN_1$. O plano do Equador $EQ_0$, por ser perpendicular à $PN_0$, também se desloca, gerando um novo plano do Equador, $EQ_1$, perpendicular a $PN_1$. Consequentemente, o ponto $\gamma_0$ se desloca gerando um novo ponto $\gamma_1$. Este processo gera novos pólos $PN_n$, novos planos $EQ_n$ e novos pontos $\gamma_n$. A projeção dos Pólos $PN_n$ na esfera celeste, conforme mostrado na figura $3$, descreve uma circunferência num período de aproximadamente $26.000$ anos, sendo esta a base de um cone com vértice no centro da Terra.
$6 -$ Nutação
A nutação é uma oscilação na curva circular da precessão, resultando uma curva ondulada, onde o eixo de rotação da Terra oscila em torno de sua posição média, conforme mostra a figura $7$.[Figura $7-$ Nutação]
Sua origem é a mesma da precessão, no entanto, tem a Lua com sua maior influência. Os períodos da nutação variam desde cerca de $182$ dias até cerca de $18,6$ anos.
Pelo fato de seu efeito ser muito menor do que o causado pela precessão, a nutação só foi descoberta em $1.747$ pelo físico inglês James Bradley, que estudava a estrela $\gamma \text{Draconis}$. Notou que esta estrela apresentava variações regulares com oscilações em pequenas amplitudes e pôde confirmar que estas variações não eram exclusiva da estrela $\gamma \text{Draconis}$, mas acontecia em todas as estrelas do sistema referencial.
$7 -$ Efeitos da Precessão
$7.1-$ Mudanças nas coordenadas de Ascensão Reta e Declinação de uma estrela
O Sistema Equatorial de Coordenadas utiliza o plano equatorial como referência e as posições das estrelas são baseadas em dois ângulos: Ascensão Reta $\alpha$ e Declinação $\delta$ de uma estrela.Ascensão Reta de uma estrela é o ângulo formado entre as retas que ligam o centro da Terra ao ponto $\gamma$ e ao ponto de intersecção do Equador com o meridiano da estrela, denotada por $P$, conforme mostra a figura $8$. A Ascensão Reta varia entre $0^\circ$ e $360^\circ$, medidos no sentido para o Leste. No entanto, por convenção, a Ascensão Reta é medida em unidades de tempo: em horas, minutos e segundos. Com isto, faz-se a relação:
\begin{equation}
\begin{matrix}
360^\circ & = & 24h\\
\alpha & = & 1h
\end{matrix}
\end{equation}
Utilizando uma regra de três simples, encontra-se que $1^h$ equivale a $15^\circ$.
Declinação de uma estrela é o ângulo formado entre as retas que ligam o centro da Terra à estrela e ao ponto de intersecção do Equador com o meridiano da estrela, conforme mostra a figura $8$. A Declinação é medida em graus, minutos e segundos de arco e varia de $–90^\circ$ à $90^\circ$, sendo no Equador igual a $0^\circ$, em direção ao Pólo Norte $\delta > 0$ e em direção ao Pólo Sul, $\delta < 0$. O complemento da declinação é chamado de Distância Polar, denotado por ρ, que é o ângulo formado pelas direções do centro da Terra à estrela e ao Pólo Norte, dado por: $\rho = 90^\circ ─ \delta$.
[Figura $8-$ Coordenadas Equatoriais: Ascensão Reta e Declinação]
A precessão causa o deslocamento do ponto $\gamma$ no sentido contrário ao da rotação da Terra, consequentemente este deslocamento causa variações nas coordenadas de Ascensão Reta e Declinação de uma estrela. Estas variações da Ascensão Reta, $\Delta _\alpha$, e Declinação, $\Delta_\delta$∆, são dadas por:
\begin{equation}
\begin{matrix}
\Delta_\alpha & = & \alpha_1 - \alpha_0\\
\Delta_\delta & = & \delta_1 - \delta_0
\end{matrix}
\end{equation}
onde $\alpha_0$ é a ascenção reta relativa a $\gamma_0$, $\alpha_1$ é a escenção reta relativa a $\gamma_1$, $\delta_0$ é declinação relativa a $\gamma_0$ e $\delta_1$ é a declinação relativa a $\gamma_1$.
$7.2 -$ Antecipação dos equinócios
Os equinócios são os dois únicos dias no ano em que o dia e a noite têm a mesma duração. São os equinócios de primavera e de outono, que ocorrem, respectivamente, em torno de $22$ de setembro e $21$ de março no hemisfério Sul.Os equinócios acontecem quando o Sol, em seu movimento aparente, está sobre os pontos de intersecção dos planos da Eclíptica com o do Equador, passando do Hemisfério Sul para o Norte no equinócio de outono, em março e do hemisfério Norte para o Sul no equinócio de primavera, em setembro. Esses pontos são chamados de ponto vernal ou ponto $\gamma$ e ponto $\Omega$, respectivamente.
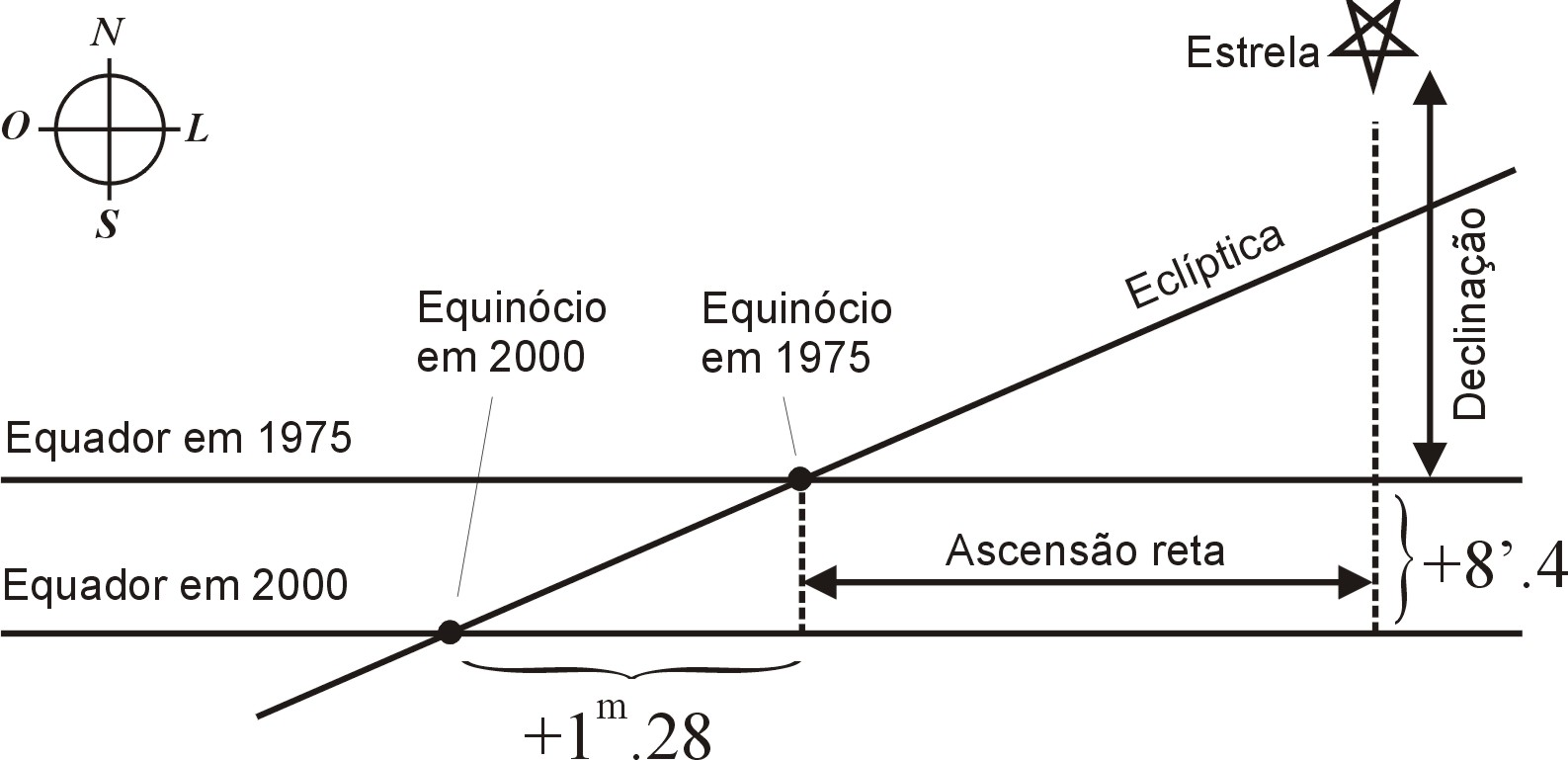
Como a precessão causa o deslocamento do ponto vernal no sentido contrário ao da rotação da Terra, os pontos equinociais se deslocam de modo a se antecipar com o tempo. A figura $9$ mostra a variação do equinócio tendo como referência os anos de $1.975$ e $2.000$:
[Figura $9-$ Precessão do equinócio]
A Ascensão Reta da estrela aumentou em $1^m,28$, equivalente a $0,32^\circ$, ou seja, aumentou $19^\prime 12^{\prime \prime}$. A Declinação da estrela aumentou $8^\prime ,4$, ou seja, aumentou $8^\prime 24^{\prime \prime}$.
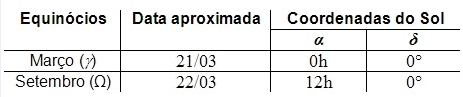
A tabela abaixo mostra as coordenadas do Sol nos equinócios:
[Tabela $1-$ Coordenadas do Sol nos equinócios]
Na Astrologia, os signos zodiacais foram designados pelos nomes das constelações por Hiparco, divididos em $12$ partes e seqüenciados a partir do ponto vernal. Na época, a constelação observada no equinócio de março, era a de Áries. Como a precessão causa a antecipação do ponto vernal, hoje nos equinócios de março a constelação vigente é a de Peixes. Portanto, as constelações zodiacais observadas nos equinócios mudam a cada $2.000$ anos, aproximadamente, antecipando lentamente o conjunto dos signos.
$7.3 -$ Mudança do céu
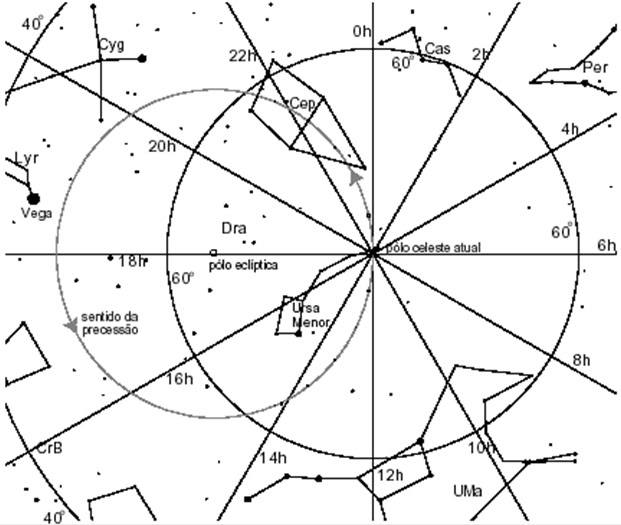
Devido às variações dos Pólos da Terra causados pela precessão, conseqüentemente o céu observado também varia. Hoje, o Pólo Norte aponta para as proximidades da estrela Polar, na constelação da Ursa Menor. Como a precessão leva cerca de $26.000$ anos para completar seu ciclo, daqui a $13.000$ anos o Pólo Norte apontará para as proximidades da estrela Vega, na constelação de Lira. A figura $10$ mostra o percurso no Pólo Norte Celeste em torno do Pólo Norte da Eclíptica:[Figura $10-$ Percurso do Pólo Norte Celeste em torno do Pólo Norte da Eclíptica
Fonte: BIERRENBACH, $(2.004, p. 45)$]
Fonte: BIERRENBACH, $(2.004, p. 45)$]
$8 -$ Correção da precessão
Para calculara correção das coordenadas de Ascensão Reta e Declinação, utilizam-se as fórmulas:\begin{equation}
\begin{matrix}
\frac{d\delta}{dt}=N\cdot \cos(\alpha)\\
\frac{d\alpha}{dt}=M+N\cdot \text{sen}(\alpha)\cdot\text{tg}(\delta)
\end{matrix}
\end{equation}
As fórmulas e os valores para $M$ e $N$ dados acima são válidos para um prazo de $20$ anos, centrados no ano $2.000$. São dados pelo The Astronomical Almanac, publicado por U. S. Nautical Almanac Office nos Estados Unidos (UNNO) e Her Majesty's Nauticali no Reino Unido (HMNAO), conforme SANTIAGO, $(2005, p.76)$. As variações para $\alpha$ e $\delta$ são dadas em segundos de tempo e segundos de arco, respectivamente.
$8.1 -$ A estrela Sirius
A estrela Sirius é a mais brilhante no céu noturno, visível na constelação de Cão Maior e encontra-se a apenas $8,7$ anos-luz da Terra.Em $18.62$ descobriu-se que Sirius é na verdade um sistema binário. A estrela principal é aquela visível no céu e é chamada de Sirius $A$. Possui uma luminosidade de $23$ vezes maior que a do Sol e sua massa é cerca de $2,1$ massas solares. Sua companheira, muito menos brilhante, é a Sirius $B$ e foi a primeira estrela anã branca a ser descoberta, possuindo uma massa aproximadamente igual à do Sol, mas com diâmetro cerca de $50$ vezes menor.
Dadas as coordenadas de Ascensão Reta e Declinação de Sirius no ano $2.000$:
\begin{equation}
\begin{matrix}
\alpha &=& 06^h \: 45^m \: 08,9^s\\
\delta &=& -16^\circ \: 42^\prime \: 58^{\prime \prime}
\end{matrix}
\end{equation}
Para observar a estrela no ano de 2007, será preciso ajustar as coordenadas do telescópio devido às variações causadas pela precessão.
O primeiro passo é transformar suas coordenadas para graus decimais. Para a Ascensão Reta, faz-se:
\begin{equation}
\begin{matrix}
\alpha = 06^h \: 45^m \: 08,9^s\\
\alpha = 06 + \frac{45}{60} +\frac{08,9}{3600}\\
\alpha = 6,7524722^\circ
\end{matrix}
\end{equation}
Como $1^h$ equivaçe a $15^\circ$, multiplica-se o valor de $\alpha$ por $15$, encontrando:
\begin{equation}
\alpha = 101,2870833^\circ
\end{equation}
Para a Declinação, faz-se:
\begin{equation}
\begin{matrix}
\delta = -16^\circ \: 42^\prime \: 58^{\prime \prime}\\
\delta = -\left( 16+ \frac{42}{60} + \frac{58}{3600}\right)\\
\delta = -16,716111^\circ
\end{matrix}
\end{equation}
Para calculara correção da Ascensão Reta, faz-se
\begin{equation}
\begin{matrix}
\frac{d\alpha}{dt}=M+N\cdot \text{sen}(\alpha)\cdot\text{tg}(\delta) \\
\frac{d\alpha}{dt}=3,07419+20,0383\cdot\text{sen}(101,2870833)\cdot \text{tg}(-16,716111)\\
\frac{d\alpha}{dt}=-2,827336605 \cong -2,83 \:s/ano
\end{matrix}
\end{equation}
Para calcular a correção da coordenada de Declinação, faz-se:
\begin{equation}
\begin{matrix}
\frac{d\delta}{dt}=N\cdot \cos(\alpha)\\
\frac{d\delta}{dt}=20,0383 \cdot \cos(101,2870833)\\
\frac{d\delta}{dt}=-3,921997578^{\prime \prime} \cong -3,922 \:^{\prime \prime}/ano
\end{matrix}
\end{equation}
Estes valores encontrados são as variações das coordenadas referentes a $1$ ano. Como deseja-se saber a variação em $7$ anos, multiplica-se estes valores por $7$. encontrando:
\begin{equation}
\Delta \alpha = -19,81^s\\
\Delta \delta = -27,454^{\prime \prime}
\end{equation}
onde $\Delta \alpha$ é a variação da coordenada de Ascensão Reta em $7$ anos e $\Delta \delta$ é a variação da coordenada de Declinação em $7$ anos.
Para computar as coordenadas para o ano de $2.007$, estas variações devem-se ser adicionadas às coordenadas do ano $2.000$:
\begin{equation*}
\alpha_{2000}+\Delta \alpha = \alpha_{2007} \Rightarrow 06^h45^m08,9^s-19,81^s=06^h44^m49,09^s\\
\delta_{2000}+\Delta \delta=\delta_{2007} \Rightarrow-16^\circ42^\prime58^{\prime \prime}-27,454^{\prime \prime}=-16^\circ 43^\prime 25,45^{\prime \prime}
\end{equation*}
Portanto, as coordenadas da estrela Sirius em $2.007$ serão:
\begin{equation}
\begin{matrix}
\alpha&=&06^h44^m49,09^s\\
\delta&=&16^\circ 43^\prime 25,45^{\prime \prime}
\end{matrix}
\end{equation}
$9 -$ Conclusão
Através deste estudo foi possível verificar as origens da precessão, assim como alguns de seus efeitos sobre a Terra.Verificou-se, então, que a precessão é causada pelas forças gravitacionais do Sol, que geram um torque na Terra, deslocando seus pólos, o plano do Equador e, consequentemente, o ponto $\gamma$, que se desloca lentamente num sentido retrógrado ao movimento de rotação da Terra. Esta retrogradação provoca a mudança do céu observado, causando alterações nas coordenadas equatoriais de um astro e a antecipação dos equinócios.
Devido ao movimento de precessão da Terra ser muito lento, onde um ciclo leva cerca de $26.000$ anos, seus efeitos são imperceptíveis para um observador na Terra. No entanto, para um astrônomo observar um astro qualquer é necessário ajustar as coordenadas em seu telescópio para corrigir as variações causadas pela precessão.
Logo, os efeitos causados pela precessão influem somente em questões observacionais, não afetando a vida terrestre.
$10 -$ Referências bibliográficas
[1] BIERRENBACH, G. L. N. Astronomia de Posição: Notas de Aula. V. 30.11.2004.
[2] CHUN, W. I. Estudo da Precessão e Nutação. Trabalho (Graduação I em Geofísica) – Instituto Astronômico e Geofísico. São Paulo: Universidade de São Paulo, 1992.
[3] MILONE, A. M.; WUENSCHE, C. A.; RODRIGUES, C. V.; et al. Introdução à Astronomia e Astrofísica. INPE, 2006.
[4] NUSSENZVEIG, H. M. Curso de física básica, V1 Mecânica. 3. ed. São Paulo: Edgard Blücher, 1981.
[5] PARANÁ, D. N. S. Física—Mecânica, V1. 10. ed. São Paulo: Ática, 2003.
[6] REINHARDT, R. Elementos de Astronomia e Mecânica Celeste, São Paulo: Edgard Blücher, 1975.
[7] SANTIAGO, B.; SALVIANO, A. Astronomia Geodésica:Posicionamento pelas Estrelas.
[8] SCIENTIFIC AMERICAN GÊNIOS DA CIÊNCIA - NEWTON: O PAI DA FÍSICA MODERNA. No. 1. São Paulo: Duetto Editorial, 2005-.
[9] STEINBRUCH, A; WINTERLE, P. Geometria Analítica. 2. ed. São Paulo: McGraw Hill, 1987.
[10] SYMON, K. R. Mecânica. 2. ed. São Paulo: Campus, 1981.
[11] http://aa.usno.navy.mil/publications/docs/almanacs.html
[12] http://astro.if.ufrgs.br/fordif/node8.htm
[13] http://www.if.ufrj.br/teaching/astron/preces/prec.html
➊ As Leis de NewtonVeja mais:
➋ As Velocidades da Terra
➌ A Lei da Gravitação Universal e o Campo Gravitacional
- Teorema Do Quadrilátero Inscritível
Um quadrilátero está inscrito numa circunferência se seus vértices são pontos desta circunferência. Teorema: Se um quadrilátero é inscritível numa circunferência, então os ângulos opostos são suplementares. Por hipóteses temos que o quadrilátero...
- Retas Perpendiculares
Veremos nesta postagem como determinar se duas retas são perpendiculares entre si, dados seus coeficientes angulares.Considere duas retas $r_1$ e $r_2$ não perpendiculares a nenhum dos eixos $x$ e $y$. Sejam $m_1$ e $m_2$ os coeficientes angulares das...
- Os Pontos De Brocard (parte 3)
Vimos na primeira postagem desta série sobre os Pontos de Brocard as definições e suas construções geométricas. Na segunda postagem, vimos algumas propriedades importantes, teoremas e corolários. Nesta terceira parte, veremos outros teoremas igualmente...
- As Velocidades Da Terra
Sabemos que a Terra executa alguns movimentos no decorrer de sua órbita ao redor do Sol. Vamos destacar os principais: Rotação e Translação. Vamos determinar as velocidades em que a Terra desenvolve em cada um desses movimentos. Movimento de RotaçãoA...
- Demonstração Da Derivada Da Função Logarítmica
Neste artigo, veremos uma demonstração de como encontrar a derivada da função logarítmica usando o conceito de derivada e limites. Iremos provar que, se $ f(x) = \ln(x)$, então sua derivada será $\displaystyle f'(x) = \frac{1}{x}$. Demonstração:Seja...