Matemática
1. Se T : V → W é uma transformação linear, mostre que:
(a) Ker(T) é um subespaço de V . (b) Im(T) é um subespaço de W.
Solução:





 Agora, somando-se membro a membro estas duas equações vetoriais, vem
Agora, somando-se membro a membro estas duas equações vetoriais, vem


 fazendo v = λu ∈ V . Isto é, existe v ∈ V tal que λw = T(v), basta tomarmos v = λu ∈ V e, portanto, λw ∈ Im(T). Daí, concluímos que Im(T) é um subespaço vetorial de W.
fazendo v = λu ∈ V . Isto é, existe v ∈ V tal que λw = T(v), basta tomarmos v = λu ∈ V e, portanto, λw ∈ Im(T). Daí, concluímos que Im(T) é um subespaço vetorial de W.
(a) Determine uma base do núcleo de T. (b) Dê a dimensão da imagem de T. (c) T é sobrejetora? Justifique. (d) Faça um esboço de Ker(T) e Im(T).
Solução:


 (c) Não. A imagem não é igual ao contradomínio já que DimIm(T) = 2 e o contradomínio tem dimensão 3.
(c) Não. A imagem não é igual ao contradomínio já que DimIm(T) = 2 e o contradomínio tem dimensão 3.
3. No plano, uma rotação anti-horária de 45◦ é seguida por uma dilatação de √ 2. Ache a aplicação
A que representa esta trasnformação do plano.
Solução:
sinθ cosθ
Que pode ser escrito como uma transformação:
 Uma dilatação D de √
Uma dilatação D de √
2(x,y). Como queremos dilatar a transformação R, teremos
 Solução: Escreva
Solução: Escreva
Aplicando T e sabendo que ela é linear, temos:


 Solução: (a) Podemos escrever essa transformação na forma:
Solução: (a) Podemos escrever essa transformação na forma:
 (b) Para a imagem, teremos
(b) Para a imagem, teremos
 6. Mostrar que a matriz do operador linear indentidade
6. Mostrar que a matriz do operador linear indentidade
I : Rn → Rn,I(v) = v em uma base qualquer, é a matriz identidade n × n.
Solução:
Daí, a matriz de transformação será

 Solução: Escreva a combinação
Solução: Escreva a combinação
Como T é linear,
Sendo T injetiva, é L.I.
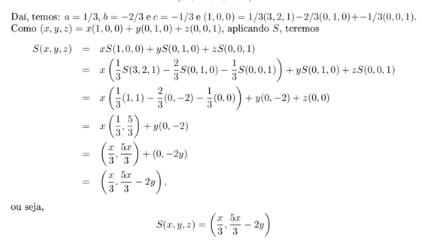
(d) Ache a transformação linear P : R2 → R2 tal que P = S ◦ T
Solução:

 ou seja,
ou seja,
(c)
 ou seja,
ou seja,
(d)
Solução:

 10. Seja T : V → W uma transformação. Mostre que se T é linear, então T(0) = 0.
10. Seja T : V → W uma transformação. Mostre que se T é linear, então T(0) = 0.


- Sistema Linear Homogêneo
Um sistema linear é homogêneo quando os coeficientes, independente de todas as suas equações lineares, são iguais a zero. Esse tipo de sistema possui pelo menos uma solução possível, pois podemos obter como resultado o terno (0, 0, 0), chamamos...
- Sistemas E Equações Lineares
Equações Lineares As equações do tipo a1x1 + a2x2 + a3x3 + .....+ anxn = b, são equações lineares, onde a1, a2, a3, ... são os coeficientes; x1, x2, x3,... as incógnitas e b o termo independente. A equação 4x – 3y + 5z = 31 é uma equação...
- Transformações Lineares
Obter a expressão geral da transformação linear T:R³R² definida de tal modo que T(1,0,0)=(1,0), T(0,1,0)=(1,1) e T(0,0,1)=(1,−1). Depois de obter a forma geral, obtenha o vetor v em R³, tal que T(v)=(1,2). Para resolver este problema devemos escrever...
- Sistema Por Cramer
Resolvendo sistemasSabemos que sistema linear é um conjunto de n equações lineares com n incógnitas relacionadas entre si. A solução de um sistema linear pode ser obtida de várias maneiras. Veremos uma das formas de resolução de um sistema...
- Regra De Cramer Para Resolução De Sistemas
Professor de Matemática no Colégio Estadual Dinah Gonçalves E Biologia na rede privada de Salvador-Bahia Professor Antonio Carlos carneiro Barroso email [email protected] HTTP://ensinodematemtica.blogspot.com e HTTP://accbarroso60.wordpress.com...
Matemática
Transformações Lineares
1. Se T : V → W é uma transformação linear, mostre que:
(a) Ker(T) é um subespaço de V . (b) Im(T) é um subespaço de W.
Solução:
(a) Determine uma base do núcleo de T. (b) Dê a dimensão da imagem de T. (c) T é sobrejetora? Justifique. (d) Faça um esboço de Ker(T) e Im(T).
Solução:
3. No plano, uma rotação anti-horária de 45◦ é seguida por uma dilatação de √ 2. Ache a aplicação
A que representa esta trasnformação do plano.
Solução:
sinθ cosθ
Que pode ser escrito como uma transformação:
2(x,y). Como queremos dilatar a transformação R, teremos
Aplicando T e sabendo que ela é linear, temos:
| α1 = α2 = | = αm = 0. |
I : Rn → Rn,I(v) = v em uma base qualquer, é a matriz identidade n × n.
Solução:
| T(v1) = 1 · v1 + 0 · v2 + | 0 · vn |
| T(v2) = 0 · v1 + 1 · v2 + | + 0 · vn |
| T(vn) = 0 · v1 + 0 · v2 + | + 1 · vn |
| a1 · Tu1 + a2 · Tu2 + | + ak · Tuk = 0(= T(0)) |
| T(a1 · u1 + a2 · u2 + | + ak · uk) = T(0). |
| a1 · u1 + a2 · u2 + | + ak · uk = 0. |
| Como u1,u2,...,uk são vetores LI, teremos a1 = a2 = | = ak = 0, e portanto {T(u1),...,T(uk)} |
(d) Ache a transformação linear P : R2 → R2 tal que P = S ◦ T
Solução:
(c)
(d)
Solução:
fonte http://www.ebah.com.br
- Sistema Linear Homogêneo
Um sistema linear é homogêneo quando os coeficientes, independente de todas as suas equações lineares, são iguais a zero. Esse tipo de sistema possui pelo menos uma solução possível, pois podemos obter como resultado o terno (0, 0, 0), chamamos...
- Sistemas E Equações Lineares
Equações Lineares As equações do tipo a1x1 + a2x2 + a3x3 + .....+ anxn = b, são equações lineares, onde a1, a2, a3, ... são os coeficientes; x1, x2, x3,... as incógnitas e b o termo independente. A equação 4x – 3y + 5z = 31 é uma equação...
- Transformações Lineares
Obter a expressão geral da transformação linear T:R³R² definida de tal modo que T(1,0,0)=(1,0), T(0,1,0)=(1,1) e T(0,0,1)=(1,−1). Depois de obter a forma geral, obtenha o vetor v em R³, tal que T(v)=(1,2). Para resolver este problema devemos escrever...
- Sistema Por Cramer
Resolvendo sistemasSabemos que sistema linear é um conjunto de n equações lineares com n incógnitas relacionadas entre si. A solução de um sistema linear pode ser obtida de várias maneiras. Veremos uma das formas de resolução de um sistema...
- Regra De Cramer Para Resolução De Sistemas
Professor de Matemática no Colégio Estadual Dinah Gonçalves E Biologia na rede privada de Salvador-Bahia Professor Antonio Carlos carneiro Barroso email [email protected] HTTP://ensinodematemtica.blogspot.com e HTTP://accbarroso60.wordpress.com...